Technological advancements have created new opportunities for space research, which might lead to fresh discoveries about the celestial bodies in our galaxy. Robots have shown to be very promising instruments for exploring other worlds, notably Mars, a terrestrial planet in the solar system believed to have components comparable to those found on Earth.
The investigation of Mars and its surface is an exciting pursuit because it may provide evidence of past or current extraterrestrial life. These investigations might lead to the finding of resources that exist outside of Earth, perhaps opening the path for future human expeditions to Mars, in addition to potentially revealing forms of ancient microbial life.
Nanjing University of Aeronautics and Astronautics researchers have built a new four-legged robot inspired by lizards that might help in the investigation of Mars’ surface. Their robot, described in MDPI’s Biomimetics magazine, features a flexible body structure that can mimic the motions and locomotion style of a desert lizard.
“Specific kinds of planetary rovers have been designed for completing activities on Mars’ surface to enable ambitious uncrewed missions to Mars,” write Guangming Chen, Long Qiao, Zhenwen Zhou, Lutz Richter, and Aihong Ji in their research. “Because the surface is made up of granular soils and boulders of varying sizes, modern rovers may struggle to move on soft soils and climb over rocks. To solve such challenges, this study creates a quadruped crawling robot based on the movement characteristics of the desert lizard.”
Chen and his colleagues built a biomimetic robot with a flexible spine-like framework and four legs. To mimic the “creeping” action of lizards, each leg has two hinges and a gear that causes a swinging movement. The hip joints that connect the spine structure to the robot’s legs are made up of two servos and a four-linkage system that enables the robot to raise without losing its equilibrium. The “feet” of the robot contain four flexible “toes” made up of two hinges and a claw.
“The leg construction employs a four-linkage system, which assures a consistent lifting action,” the researchers said in their article. “The foot is made up of an active ankle and a circular pad with four flexible toes that help in dirt and rock grasping.”
The researchers constructed a number of kinematics models for each of their robot’s components in order to recreate the motions of lizards. These models and numerical computations were then utilised to design the robot’s motions.
“Kinematic models pertaining to the foot, leg, and spine are constructed to define robot movements,” Chen and his colleagues said in their article. “In addition, the synchronised movements of the trunk spine and leg are quantitatively validated.”
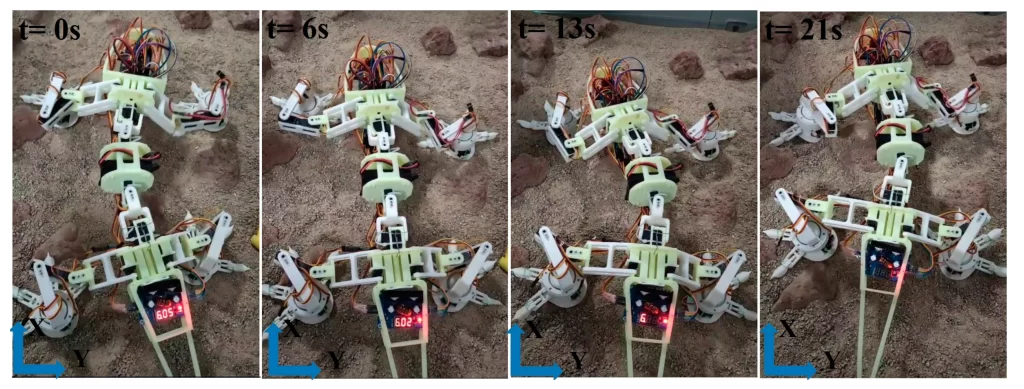
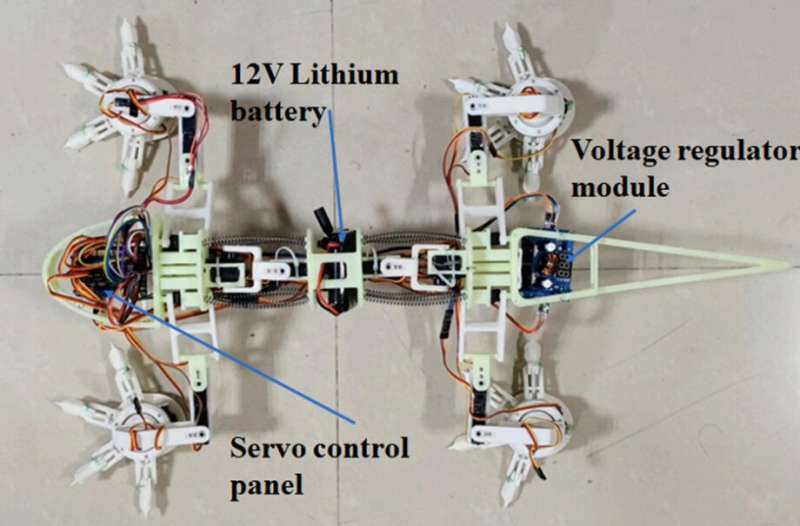
The researchers first assessed their robot in a series of simulations, to discover if it could accurately reproduce the motions of lizards. Their findings were quite encouraging, as their robot was able to accomplish the appropriate movements and walking style. Chen and his colleagues have already built a robot prototype out of 3D-printed resin materials, a servo control panel, a lithium battery, and other electrical components. They then utilised a simulated testbed to examine the motions of their prototype robot on rough areas resembling Mars’ environment.
They showed that the robot could efficiently travel in rough terrain, underlining its potential for future missions on the red planet. However, before it can be deployed and tested outside the lab, the team will need to further enhance it, such as adding a protective sealing structure to shield it from dirt or airborne dust and creating its body with more robust materials.
Chen and his colleagues are now developing machine learning algorithms that will enable their robot to adapt to varied terrains. They also want to implement a system that would offer continuous power supply to the robot.
You might also be interested in reading, AI aids researchers in understanding cellular structures




