Unmanned aerial vehicles (UAVs), popularly known as drones, have revolutionized the way humans perceive the world around them. These flying machines have proven to be versatile tools that can aid in a variety of applications, ranging from scientific research to industrial inspections. Despite their many benefits, traditional UAV designs have some limitations that can impede their usefulness in specific environments. For example, drones with fixed wings may not be suitable for exploring tight spaces, while rotorcraft UAVs may struggle to fly in high-altitude areas or navigate through complex terrain. To overcome these limitations, researchers are exploring innovative designs for UAVs, such as bio-inspired drones that mimic the flight mechanics of birds or insect-like robots that can squeeze through narrow passages. By developing novel UAV designs, we can expand the range of applications and optimize the performance of these aerial vehicles, making them more effective in solving real-world problems.
Conventional UAVs are undoubtedly valuable assets in various real-world applications. However, their limitations have made it challenging to apply them in complex missions that require efficient and versatile maneuvering in changing landscapes. For instance, uneven terrains, tight gaps, and high-altitude areas can pose significant challenges for conventional UAVs, making them less effective in accomplishing critical tasks.
To address these limitations, researchers at Zhejiang University have developed a groundbreaking unmanned vehicle that can both roll on the ground and fly in the air. Unlike traditional UAVs that are limited to flying, this novel system is based on a unicycle design with a single wheel, making it more adaptable to uneven terrains and tight spaces. Additionally, the rotor-assisted turning mechanism allows the vehicle to make sharp turns and navigate through complex environments seamlessly. These unique features make the hybrid UAV capable of accomplishing complex missions that would otherwise be impossible with traditional UAV designs.
The innovative design of this hybrid UAV holds enormous potential for various real-world applications. From search and rescue missions to environmental monitoring, this system’s ability to roll and fly seamlessly makes it a highly versatile tool in various domains. Moreover, this hybrid design’s energy-efficient nature can extend the vehicle’s operation time, allowing it to cover more significant distances and accomplish more complex tasks.
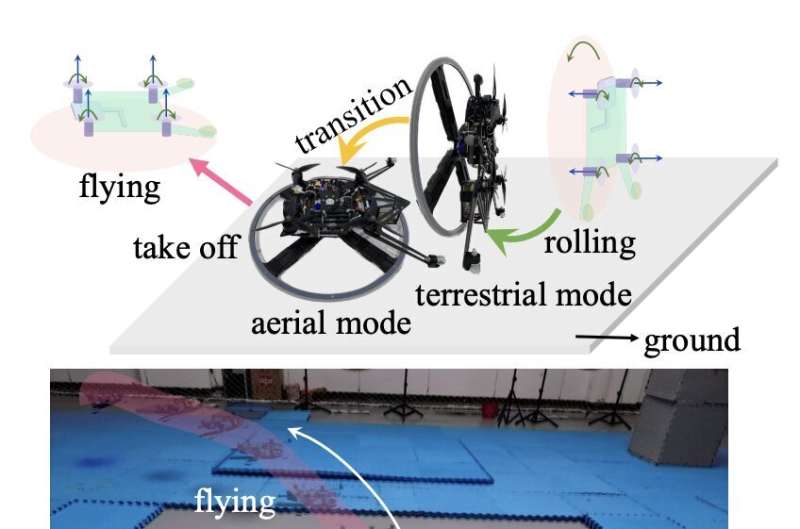
“Roller-Quadrotor is a novel hybrid terrestrial and aerial quadrotor that combines the elevated maneuverability of the quadrotor with the lengthy endurance of the ground vehicle,” Zhi Zheng, Jin Wang and their colleagues wrote in their paper. “Flying is achieved through a quadrotor configuration, and four actuators providing thrust. Rolling is supported by unicycle-driven and rotor-assisted turning structure. During terrestrial locomotion, the vehicle needs to overcome rolling and turning resistance, thus saving energy compared to flight mode.”
Zheng, Wang, and their team’s innovative unmanned vehicle design represents a significant breakthrough in the field of robotics and aerial vehicle technology. The hybrid system is based on a quadrotor, a type of aircraft that utilizes rotary wings to fly and hover above the ground. What sets this particular design apart is that it is based on a unicycle structure, which allows the vehicle to move on the ground and navigate challenging terrains while still maintaining the ability to fly.
This unique combination of terrestrial and aerial mobility makes the quadrotor an incredibly versatile vehicle for a range of applications. It can quickly and efficiently move through areas that would be difficult or impossible to access with conventional UAV designs, such as narrow gaps or rugged terrain. Moreover, its ability to hover and fly makes it an excellent tool for aerial surveillance, search and rescue operations, and environmental monitoring.
The quadrotor’s hybrid design also has the potential to overcome the limitations of conventional ground-based vehicles, which may not be able to access hard-to-reach areas or navigate through complex environments. By combining the advantages of both terrestrial and aerial mobility, this innovative vehicle design represents a significant advancement in unmanned vehicle technology, offering a more efficient and effective way to tackle real-world problems.
“This work overcomes the challenging problems of general rotorcraft, reduces energy consumption and allows movement through special terrains, such as narrow gaps,” the researchers wrote in their paper. “It also solves the obstacle avoidance challenge faced by terrestrial robots by flying.”
Zheng, Wang, and their colleagues have not only designed a hybrid vehicle capable of seamlessly transitioning between terrestrial and aerial mobility, but they have also developed a series of models and controllers to optimize its performance. In their paper, they describe the technical details of their vehicle’s design, including the unicycle structure, rotor-assisted turning mechanism, and control systems.
To test the performance of their hybrid vehicle, the team conducted a series of experiments in an environment monitored by cameras and motion capture sensors. These experiments demonstrated the vehicle’s ability to navigate uneven terrain, climb stairs, and pass through narrow gaps while rolling on the ground. They also showed its ability to take off vertically, fly, and hover at various altitudes.
The results of these experiments are a testament to the team’s innovative approach to unmanned vehicle design. Their vehicle’s ability to transition seamlessly between different modes of operation opens up new possibilities for its use in various real-world applications, from search and rescue missions to environmental monitoring. Moreover, the development of models and controllers optimized for its performance paves the way for future advancements in hybrid vehicle technology. By combining the advantages of terrestrial and aerial mobility, Zheng, Wang, and their colleagues’ hybrid vehicle represents a significant step forward in unmanned vehicle design.
“We design the models and controllers for the vehicle,” Zheng, Wang and their colleagues wrote in their paper. “The experiment results show that it can switch between aerial and terrestrial locomotion, and be able to safely pass through a narrow gap half the size of its diameter. Besides, it is capable of rolling a distance approximately 3.8 times as much as flying or operating about 42.2 times as lengthy as flying.”
Zheng, Wang, and their colleagues’ innovative hybrid vehicle design holds promise for a wide range of real-world applications. However, before it can be deployed in such scenarios, it must undergo further testing and evaluation in a variety of environments. The initial results obtained by the researchers are promising, suggesting that the vehicle’s unique design and capabilities could make it well-suited for missions that require navigating tricky terrains, passing through narrow passages, and operating for extended periods of time.
To further enhance their vehicle’s performance, the team plans to continue refining their design and control systems. In future studies, they aim to improve the accuracy of the models they developed and introduce more advanced control algorithms. These improvements could help to make the vehicle’s transition from rolling to flying modes even smoother, while also enhancing its navigation capabilities. Ultimately, the goal of these efforts is to create a hybrid vehicle that is both highly efficient and effective, capable of addressing a wide range of real-world challenges.
“We are also considering structural optimization and weight reduction, to further improve the energy consumption performance,” the researchers concluded in their paper. “Furthermore, we will use planning algorithms to enhance vehicle mobility.”
You might also be interested in reading, Surprising Study Shows New Yorkers Welcoming to Robots in Public Spaces, Challenging Stereotypes




