Humans possess an incredible ability to adapt their movements according to the materials they handle and the tasks at hand. Take the example of chopping fruits and vegetables – over time, we learn to maneuver around harder parts like avocado or peach seeds, or peel off the outer skin with precision. This innate adaptability is a hallmark of human intelligence, allowing us to accomplish complex tasks with ease and finesse.
Scientists from Columbia University, CMU, UC Berkeley, and other institutes in the United States have developed a machine learning-based system called RoboNinja that allows robots to cut multi-material objects with varying textures and compositions. The researchers’ goal is to enhance the capabilities of robots designed to assist humans with everyday chores and kitchen tasks.
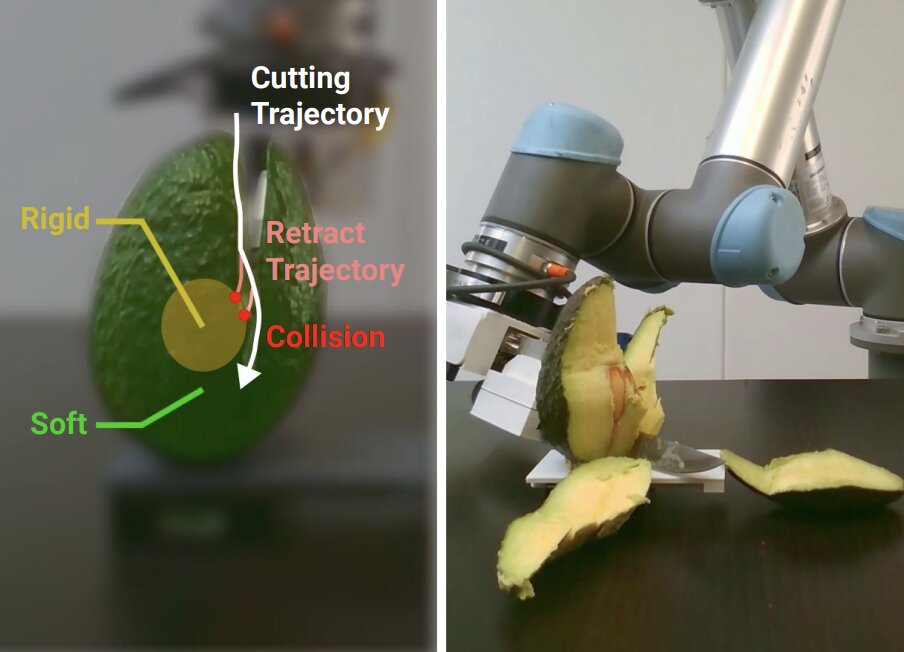
The system developed by the scientists, which was published on the arXiv pre-print server, is capable of removing the soft pulp from the rigid seed in fruits such as mangos, avocados, and peaches while minimizing collisions with the central seed and consuming a limited amount of power.
The RoboNinja system employs sparse collision information to iteratively estimate the position and geometry of an object’s core and then generates closed-loop cutting actions based on the estimated state and a tolerance value. The adaptiveness of the policy is achieved through the tolerance value, which modulates the policy’s conservativeness when encountering collisions, maintaining an adaptive safety distance from the estimated core.
The researchers created a cutting simulation environment to evaluate their system for multi-material object cutting, which allowed them to remove a significant amount of soft materials from objects while minimizing collisions with rigid parts and consuming a reasonable amount of energy. They subsequently tested their framework on a real robotic gripper to further validate its performance in real-world settings and while cutting objects with different core geometries.
The scientists’ experimental findings and newly developed simulator, they hope, will inspire future work on robot learning involving interactions with multi-material objects.
You might also be interested in reading, Chromatid Cohesion Defects Detection: How Neural Networks are Revolutionizing Genetic Analysis




