Researchers at the Technical University of Munich (TUM) have created autonomous driving software that distributes risk on the road fairly. The software’s algorithm is said to be the first to include the EU Commission expert group’s 20 ethical guidelines, resulting in much more differentiated conclusions than earlier algorithms.
The operation of self-driving cars will be made substantially safer by analysing the various degrees of danger to pedestrians and motorists. The source is freely accessible to the public as Open Source software.
Technical realisation is not the only hurdle that must be overcome before self-driving cars may be used on public roads on a big basis. Ethical considerations are significant in the creation of the associated algorithms: In the event of an approaching accident, software must be able to manage unanticipated scenarios and make the appropriate judgements.
TUM researchers have created the first ethical algorithm that distributes risk levels equitably rather than using an either/or concept. Approximately 2,000 critical-situation scenarios were evaluated across different sorts of streets and locations such as Europe, the United States, and China. The study published in Nature Machine Intelligence is the product of a collaboration between the TUM Chair of Automotive Technology and the Chair of Business Ethics at the TUM Institute for Ethics in Artificial Intelligence (IEAI).
TUM Chair of Automotive Technology scientist Maximilian Geisslinger describes the approach: “When presented with an ethical option, autonomous cars have always had to make an either/or judgement. However, street traffic cannot always be classified into black and white scenarios; the myriad grey hues in between must also be addressed. Our programme considers multiple hazards and makes an ethical decision from among thousands of alternative actions in a fraction of a second.”
More alternatives in emergency circumstances
An expert group specified the essential ethical principles on which the software’s risk rating is based in a written report for the EU Commission in 2020. The suggestion covers fundamental concepts such as priority for the most vulnerable road users and a fair allocation of risk among all road users. To convert these criteria into quantitative computations, the study team categorised cars and people in street traffic based on the danger they pose to others and their propensity to take risks.
A truck, for example, might inflict catastrophic injury to other road users while causing modest damage to the vehicle itself in many cases. A bicycle, on the other hand, is the polar opposite. The algorithm was then instructed not to exceed a maximum allowed risk in the different street settings. Furthermore, the study team included factors in the calculation that account for traffic participants’ duty, such as the obligation to respect traffic laws.
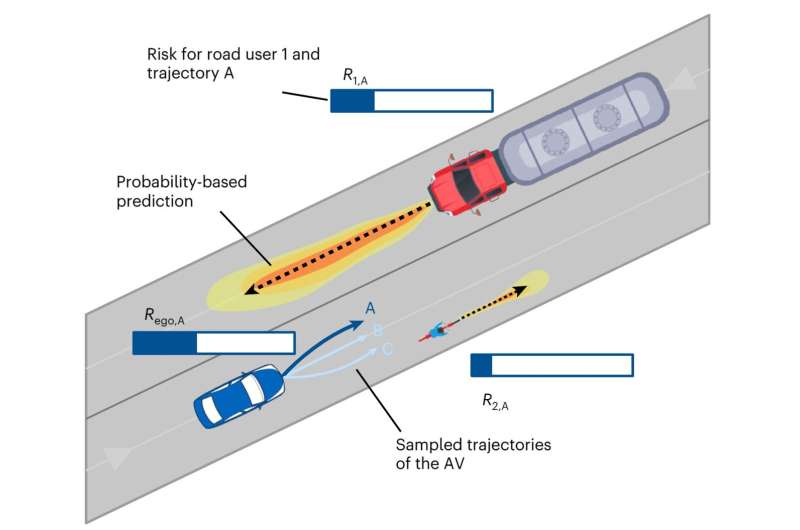
Previous techniques dealt with important circumstances on the road with a limited set of moves; in ambiguous scenarios, the car just stopped. The risk assessment that is now included into the researchers’ code results in more degrees of freedom with less danger for everyone. An example will demonstrate the method: While a truck approaches in the incoming lane, an autonomous car wishes to overtake a bicycle. All existing data about the environment and individual participants is now used.
Can the bicycle be overtaken without entering the oncoming traffic lane and keeping a safe distance from the bicycle? What is the danger presented by each vehicle, and what is the risk posed by these cars to the autonomous vehicle itself? In uncertain situations, the new software-enabled autonomous car always waits until the danger to all parties is acceptable. Aggressive movements are avoided, while the autonomous car does not just freeze and slam on the brakes. Yes and No have been replaced with an assessment with a wide number of possibilities.
‘Relying only on established ethical ideas ended in a dead end.’
“Until date, established ethical theories were often used in order to infer ethically justifiable actions made by autonomous cars. This eventually led to a dead end, since in many traffic circumstances, the only option was to breach one ethical guideline, “says Franziska Poszler, TUM Chair of Business Ethics scientist. “Our paradigm, on the other hand, prioritises risk ethics. This enables us to make more differentiated judgements by taking probability into consideration.”
The researchers stressed that, although risk ethics-based algorithms may make judgements based on the underlying ethical principles in every potential traffic condition, they cannot ensure accident-free street traffic. In the future, it will be required to include further distinctions such as cultural disparities in ethical decision-making.
Until recently, the TUM algorithm has been verified in simulations. The programme will be evaluated on the road in the future utilising the research vehicle EDGAR. The code containing the study results is accessible as Open Source software. TUM is therefore helping to produce practical and safe autonomous cars.
You might also be interested in reading, Marine robots designed to function in alien waters are inspired by aquatic life




